
The speed control of electric motors may now be seen all over modern life. As a result, we can see how critical and essential this speed control technique is for a variety of electrical equipment, quadcopters, and drones. In the same way that a gear box in a car informs the wheels what speed they must revolve at, an ESC controls the speed at which the motor must rotate when the throttle is applied. The flight controller sends this throttle signal to the ESC, which spins the motor.

The majority of modern ESCs are so advanced and packed with functionality that they put earlier ESCs to shame. Let’s take a glance into the world of an ESC without wasting any time. Choosing an ESC is a difficult task. This post will show you how to do just that using various parameters.
What is Electronic Speed Control or ESC?
An electronic speed control (ESC) is a circuit that accepts throttle signals from a flight controller and controls the brushless motor speed.
The Electronic Speed Controller works similarly to the transmission in an automobile. The ESC controls the speed at which the motor spins to apply the throttle and instructs the wheels how fast they must turn. The flight controller sends this throttle signal to the ESC spinning motor.
The ESC functions similarly to a car’s gearbox. The ESC controls the speed at which the motor must spin to apply the throttle, and it tells the wheels how fast they must turn. This throttle signal is sent by the flight controller to the ESC spinning motor.

Why are ESCs important?
Quadcopters are inherently unstable due to their four motors. In helicopters, however, only one pair of blades is used to create propulsion. They’re also a lot more reliable (the tail rotor simply counters the torque generated by the main rotor).

A precise gyro in the flight controller monitors the craft’s location and makes tiny connections every second to ensure the motors spin at the correct speed to maintain stability. Between the flight controls and the motors, the ESCs serve as a go-between. They give signals to the ESCs, which subsequently tell the motors to slow down Without ESCs, the flight controller cannot connect directly with the motors. Three wires carry current from the ESCs to the motor. The motor’s speed is determined by the quantity of current they send.
How Do You Choose The Best ESC?
The high-quality ESC ensures safe and comfortable flying. When choosing an ESC, a variety of parameters are taken into account, including:
- Current Rating
- Input Voltage Rating
- Weight and Size
- ESC Firmware
- BEC
- Connection of ESC
- ESC processors
- ESC Protocols
1. Current Rating
The current rating of an ESC should be the first factor to examine when selecting one. As they spin, the motors draw current. It can overheat and eventually cause harm if the current rating or ampere rating is higher than your ESC capacity. Determine the current rating of your ESC after you’ve chosen the proper size motor for you.
- Current draw of your ESC
- Motors with high KV ratings
- Larger propellers (length & pitch)
- Motor size larger (stator width and height)
ESC is now rated in two ways: continuous and burst. The greatest continuous current that an ESC can safely manage is indicated by the continuous current rating. The burst rating is the maximum current that an ESC can safely handle for a short amount of time (e.g., 10 seconds) without causing damage to the ESC.

2. Input Voltage Rating
The voltage rating of an ESC is the maximum voltage it can safely tolerate. Some ESCs can work with 3S-4S batteries, while others can work with 6S batteries. Check to see if they’re compatible with the LiPo voltage. Excessively high voltage used to power your ESC will destroy both the ESC and the motor.
3. Weight and Size
The weight and size of an ESC are determined by the current rating of the device. It’s difficult to develop ESCs that are lighter and smaller without sacrificing performance or effective cooling. Single standalone ESCs are usually around 4 gramme to 6 gramme in weight, while 4 in 1 ESCs are around 12 gramme to 15 gramme in weight. The lighter the ESC, the lower the heat dissipation, raising concerns about overheating.
4. ESC Firmware
Each ESC’s firmware is the software that runs on it. It determines ESC’s performance. The ESC firmware contains information on the protocols that are supported as well as the configuration interface. There are several varieties of ESC firmware to choose from.
- BLHeli ESC.
- BLHeli_S ESC
- SimonK ESC
- KISS firmware
- BLHeli_32
Out of these, BLheli firmware and Simonk firmware are open sources and KISS firmware is closed source means it can run with only KISS ESC.
5. With or Without BEC
Battery Elimination Circuit (BEC) is an acronym for Battery Elimination Circuit. The BEC maintains a steady current at a predetermined voltage. The flight controller, a radio receiver (RX), and other 5V components are powered via the 5V output. However, nowadays, the power distribution board is employed in quadcopter systems, so we don’t actually require ESCs with BEC.

Opto ESC refers to an ESC without BES. Your Flight controller and RX will require a separate power supply without the 5V BEC. An ESC does not contain the “red” servo wire, as shown in the illustration above. Only the signal and ground wires are used.
6. Connection of ESC with motor
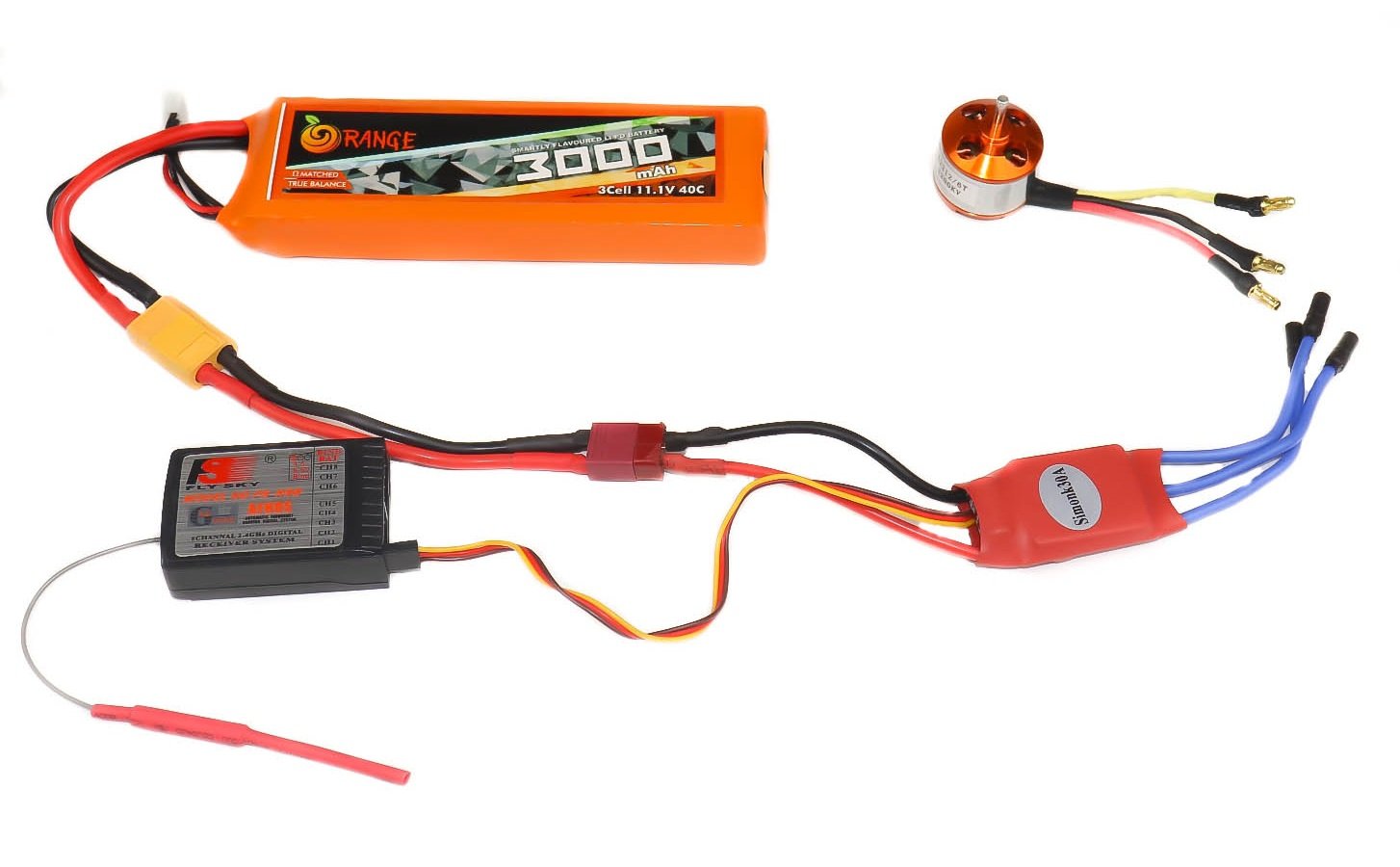
The ESC is powered by a LiPo battery. The speed of the motor is controlled by the signal received from the flight controller. A brushless ESC has three wires that plug into or are soldered to the three wires of the motor. The single standalone ESC with LIPO battery, RC receiver, and brushless motor is shown below.
7. ESC Protocols
Protocols are similar to ESC’s operating system. They influence how quickly the ESC and the FC (flight controller) communicate, which has a big impact on how well a quadcopter handles and performs.
Here is a list of current protocols used on quadcopters, from oldest to latest:
- Standard PWM
- Oneshot125
- Oneshot42
- Multishot
- DShot
- ProShot
8. ESC Processors
The majority of ESC’s processors come from ATMEL, Silabs, and ARM Cortex. All of these processors have unique features, characteristics, and firmware support.
- ATMEL 8-bit is compatible with both SimonK and BLHeli firmware
- SILABS 8-bit is compatible with BLHeli or BLHeli_S only
- ARM Cortex 32-bit (e.g. STM32 F0, F3, L4) can run with BLHeli_3
The Best Quadcopter ESC

The most prevalent firmware for multirotor ESCs is Bethel, Simonk, or Kiss. CleanFlight’s support for “BLHeli passing through,” which is incorporated into all CleanFlight-based flight controllers, makes this possible. This enables you to programme and update your multirotor ESCs straight from your flight controller’s computer.
If you wish to upgrade from the more complicated linear mode type BEC to a more efficient switching mode, make sure you get the right one. You’ll need to brush up on your math and vocabulary (types, input voltages. output voltages. ratings, etc.). To make certain you have everything you require,
Applications of ESC
Electronic speed control systems are used in remote control and vehicle applications.
- Electric cars
- Electric bicycles
- Electric aircraft
- Cars
- Helicopters
- Airplanes
- Boats
- Quadcopters
- ESC Firmware
Conclusion
The ESC is one of many components that work together to make a drone the responsive, easy-to-use flying device that we have come to expect. It essentially serves as a relay between the drone’s flight controller and the motors, converting pilot directions into actual movement.
Most consumer-grade drones should already have an ESC built-in, so casual drone pilots shouldn’t have to worry about it. Those who enjoy tinkering with DIY drones will find that having a basic understanding of how ESCs function and its best features will help them fine-tune how their drones perform. Choosing the correct ESC is crucial for drone applications that require rapid response and the ability to keep your drone compact.




Leave a comment