Ми живемо в технологічному суспільстві, де щодня виникає безліч інноваційних ідей. Ці інновації в електронних проектах з'являються як постійно зростаюча мережа, яка прагне постійно ділитися та збирати інформацію про останні тенденції в промисловій платформі. Створення квадрокоптера є популярним хобі в наші дні, і все більше людей присвячують свій час вивченню його компонентів та спробам зібрати квадрокоптер самостійно.

Квадрокоптери стають дедалі поширенішими, оскільки сенсори та системи керування стають більш досконалими. У цій статті ви знайдете повне дослідження щодо вибору найкращого двигуна для вашого квадрокоптера.
ВСТУП :
Першим кроком у пошуку двигунів для вашого квадрокоптера буде визначення загальної ваги коптера. Враховуючи всі компоненти пристрою, можна зробити приблизну оцінку ваги. Багато аспектів вашого квадрокоптера визначатимуться типом рами, такі як розмір пропелера, який ви можете використовувати, та розмір двигуна, який ви можете встановити. Розмір двигуна, який вам потрібен, здебільшого визначається розміром вашого дрона або квадрокоптера.
Як наслідок, першим кроком у визначенні найкращої конфігурації є визначення розміру дрона, який ви хочете побудувати, розміру пропелера, який може працювати обрана вами рама, та акумуляторів, які ви хочете використовувати. Мета полягає у створенні добре збалансованої, добре спроектованої системи, яка відповідає вашому стилю польоту, функції дрона та його розміру. Довший період польоту, довший час роботи обладнання, менший знос та нижчі температури – все це переваги правильного підбору двигуна.
СПІВВІДНОШЕННЯ ТЯГИ ДО ВАГИ
У всіх типах мультироторів важливо переконатися, що двигуни, що використовуються у вашому дроні, можуть створювати приблизно на 50% більшу тягу, ніж фактична вага дрона. Дрон не буде швидко реагувати на ваше керування та не злетить, якщо тяга всіх двигунів залишиться меншою. Навіть за умов слабкого вітру двигуни вашого дрона повинні залишатися стабільними та ефективними. Дрон з високим співвідношенням тяги до ваги матиме вищу маневреність та прискорення, але ним також буде складніше керувати.

Припустимо, що у вас є рама квадрокоптера із загальною вагою компонентів близько 800 грамів. У цьому випадку двигун квадрокоптера повинен бути здатним створювати тягу близько 400 грамів на квадрокоптер, що становить загальну тягу 1,6 кг. Це чудове правило, яке слід пам'ятати під час вибору двигуна. Тому що, щоб бути ефективним, дрон повинен бути здатним працювати в найнесприятливіших умовах.
Співвідношення тяги до ваги гоночного дрона набагато вище, ніж у стандартного мультиротора. Ідеальне співвідношення тяги до ваги для гоночних дронів становить 5:1.
Якщо ви хочете робити повільні та стабільні аерофотознімки за допомогою свого дрона, вам слід підтримувати співвідношення тяги до ваги на рівні 3:1 або 4:1.
Ефективність двигуна
Настав час перейти до ефективності двигуна, тепер, коли ми встановили коефіцієнт тяги до ваги. Це просто відношення створюваної тяги до прикладеної потужності. Як результат, ефективніший двигун споживатиме менше енергії для створення тяги.
Ефективність вашого двигуна визначає, як довго він летітиме. Це означає, що чим більша тяга, що створюється двигуном, порівняно з використаною потужністю, тим плавнішим і довшим буде ваш політ. Ефективність двигуна має вирішальне значення для збільшення часу польоту вашого дрона, тому це важливий фактор.
РУХИ МОТОРА
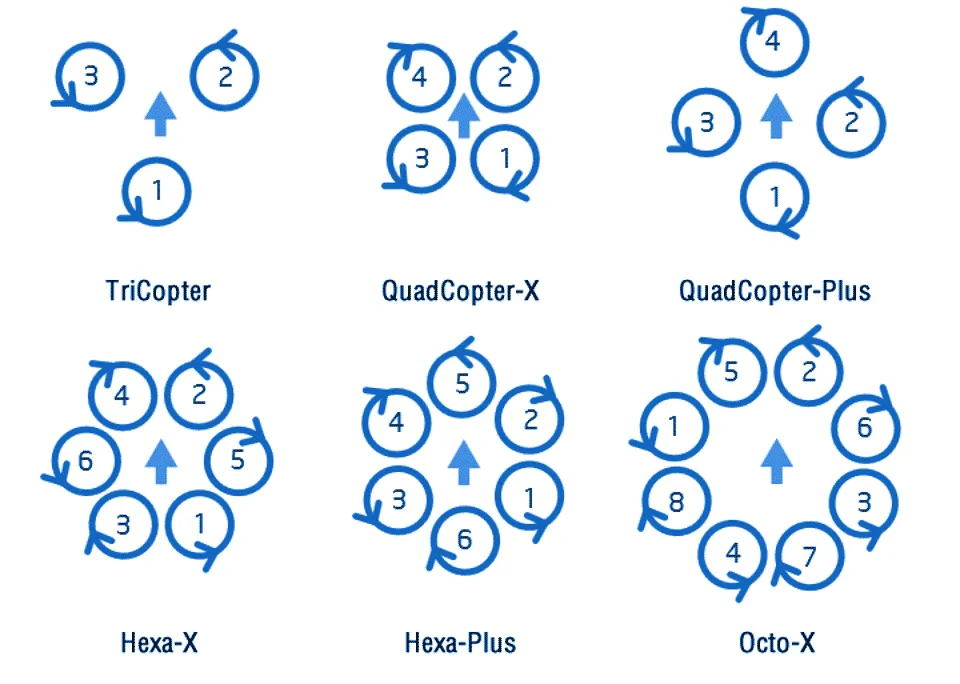
Дрони, такі як квадрокоптери, рухаються, обертаючи два двигуни за годинниковою стрілкою, а два інші — проти годинникової стрілки. Це гарантує стабільнішу роботу двигунів і ефективнішу роботу пристрою.
ПІЛУН
Далі йде питання кількості полюсів двигуна. Перший – це двигуни квадрокоптера з більшою кількістю полюсів. Під час польоту вони потребуватимуть більшої напруги, але створюватимуть більший крутний момент двигуна. Однак, в результаті цих умов, оберти двигунів знижуються. З такими двигунами рекомендується використовувати більші лопаті.
З іншого боку, використовуйте двигун з меншою кількістю полюсів, щоб отримати вищу кількість обертів. Однак ці пристрої вимагатимуть менших лопатей, які матимуть менший крутний момент і підніматимуться над землею. Квадрокоптери часто використовують двигуни з більшою кількістю полюсів, щоб уникнути необхідності використання редуктора.
N та P позначають відповідно полюси та магніти. Якщо ви шукаєте безщіткові двигуни, ви отримаєте такі характеристики, як 12N14P. Число перед N вказує на кількість електромагнітів у статорі, а число перед P вказує на кількість постійних магнітів у дзвоні.

Рейтинги КВ
Ще одним важливим параметром двигуна є номінальна сила струму (KV). Номінальна сила струму (KV) відноситься до кількості обертів двигуна на вольт. Наприклад, якщо ви оберете двигун потужністю 1000 кВ та використовуватимете 12-вольтовий літій-іонний акумулятор для живлення, загальна кількість обертів на хвилину становитиме 1000 * 12 = 12000.

Через опір повітря кількість обертів падає після встановлення гвинта на двигун. Чим більший KV, тим швидше обертається гвинт і тим більший струм він може споживати. Як результат, більші гвинти зазвичай використовуються з двигунами з низьким KV, але менші та легші гвинти кращі для двигунів з високим KV.
Коли ми поєднуємо більший пропелер з двигуном з високим KV, для швидшого обертання пропелера потрібен більший крутний момент. Він споживатиме більше струму та генеруватиме занадто багато тепла, забезпечуючи необхідний крутний момент. Перегрів може потенційно призвести до пошкодження вашого двигуна.
Розмір двигуна
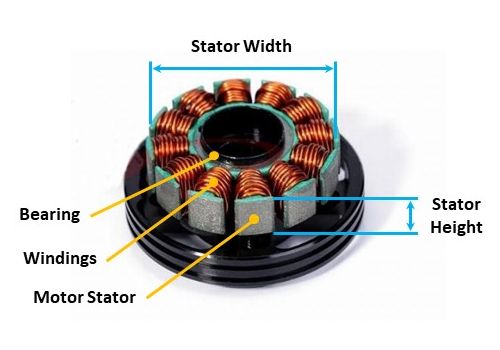
Безщіткові двигуни зазвичай класифікуються чотиризначним числом. Перші дві цифри назви двигуна, наприклад, позначають діаметр статора (у мм). Висота статора позначена останніми двома цифрами (у мм). Чим ширший і вищий двигун, тим більший крутний момент він може створити.
- Вищий статор = більша потужність на вищих обертах
- Ширший статор = більший крутний момент на нижчих обертах
Вищий статор може пропускати більше магнітне поле та сприяти розсіюванню тепла, оскільки має більшу площу поверхні. Двигуни з ширшим статором містять більшу кількість заліза та міді в статорі, що призводить до більшого крутного моменту та ефективності двигуна.
Розмір двигуна та KV обмежені розміром рами, тоді як розмір гвинта обмежений розмірами гвинта. У таблиці нижче наведено деякі рекомендації щодо розміру двигуна. Термін «розмір рами» стосується відстані між двигуном та рамою.

Напруга та струм споживання
Напруга акумулятора суттєво впливає на двигун. При вищій напрузі двигун дрона обертається швидше та споживає більше струму. Ви повинні визначити, яку тягу генерує двигун і скільки струму він споживає. Ви можете вибрати ESC на основі споживання струму комбінації двигуна та пропелера.
ВИСНОВОК
Вибір найкращого двигуна для вашого дрона – одне з найскладніших завдань. Потрібно враховувати безліч факторів. Одним з найважливіших аспектів вашого дрона є двигун, тому переконайтеся, що ви обрали той, який допоможе вам отримати максимальну продуктивність! Сподіваємося, що ця публікація в блозі допомогла вам краще зрозуміти параметри двигуна квадрокоптера.




Залишити коментар