電気モーターの速度制御は、現代生活のあらゆる場面で見られるようになりました。その結果、この速度制御技術が、様々な電気機器、クワッドコプター、ドローンにとっていかに重要かつ不可欠であるかが分かります。車のギアボックスが車輪の回転速度を制御するのと同じように、ESC(電子制御ユニット)はスロットルが操作された際にモーターの回転速度を制御します。フライトコントローラーはこのスロットル信号をESCに送信し、ESCはモーターを回転させます。

現代のESCの多くは非常に先進的で、豊富な機能を備えているため、以前のESCを凌駕しています。さあ、早速ESCの世界を覗いてみましょう。ESCを選ぶのは難しい作業です。この記事では、様々なパラメータを用いてESCを選ぶ方法をご紹介します。
電子速度制御(ESC)とは何ですか?
電子速度制御 (ESC) は、フライト コントローラーからのスロットル信号を受け取り、ブラシレス モーターの速度を制御する回路です。
電子速度制御装置(ESC)は、自動車のトランスミッションと同様の仕組みです。ESCはモーターの回転速度を制御してスロットルを作動させ、車輪の回転速度を指示します。フライトコントローラーはこのスロットル信号をESCの回転するモーターに送信します。
ESCは車のギアボックスと似た働きをします。ESCは、スロットルを作動させるために必要なモーターの回転速度を制御し、車輪の回転速度を指示します。このスロットル信号は、フライトコントローラーからESCの回転するモーターに送られます。

ESC はなぜ重要ですか?
クワッドコプターは4つのモーターを搭載しているため、本質的に不安定です。一方、ヘリコプターでは推進力を生み出すのに1対のブレードしか使用しません。また、テールローターはメインローターが生み出すトルクを打ち消すだけなので、信頼性もはるかに高くなります。

フライトコントローラーに搭載された高精度ジャイロは、機体の位置を監視し、モーターが適切な速度で回転して安定性を維持できるように、毎秒微調整を行っています。フライトコントローラーとモーターの間では、ESCが仲介役を務めます。ESCはESCに信号を送り、ESCはモーターに減速を指示します。ESCがなければ、フライトコントローラーはモーターに直接接続できません。ESCからモーターへは3本のワイヤーが電流を流します。モーターの速度は、これらのワイヤーが送る電流量によって決まります。
最適な ESC を選択するにはどうすればよいでしょうか?
高品質のESCは、安全で快適な飛行を保証します。ESCの選択にあたっては、以下のような様々なパラメータが考慮されます。
- 現在の定格
- 入力電圧定格
- 重量とサイズ
- ESCファームウェア
- BEC
- ESCの接続
- ESCプロセッサ
- ESCプロトコル
1. 電流定格
ESCを選ぶ際には、まず電流定格を確認する必要があります。モーターは回転すると電流を消費します。電流定格またはアンペア定格がESCの容量を超えると、過熱し、最終的には損傷を引き起こす可能性があります。適切なサイズのモーターを選んだ後、ESCの電流定格を確認してください。
- ESCの電流消費量
- 高KV定格のモーター
- より大きなプロペラ(長さとピッチ)
- モーターサイズが大きい(ステーターの幅と高さ)
ESCは現在、連続定格とバースト定格の2つの方法で定格されています。ESCが安全に処理できる最大連続電流は、連続電流定格で示されます。バースト定格は、ESCが損傷を与えることなく、短時間(例:10秒)安全に処理できる最大電流です。

2. 入力電圧定格
ESCの定格電圧は、安全に耐えられる最大電圧です。ESCの中には3S~4Sバッテリーで動作するものもあれば、6Sバッテリーで動作するものもあります。LiPo電圧に対応しているかどうかを確認してください。ESCに過度に高い電圧をかけると、ESCとモーターの両方が破損する可能性があります。
3. 重量とサイズ
ESCの重量とサイズは、デバイスの電流定格によって決まります。性能や冷却効率を犠牲にすることなく、より軽量で小型のESCを開発することは困難です。単体のESCは通常4~6グラム程度ですが、4 in 1 ESCは約12~15グラムです。ESCが軽量であるほど放熱性が低下し、過熱の懸念が高まります。
4. ESCファームウェア
各ESCのファームウェアは、ESC上で動作するソフトウェアです。ESCのパフォーマンスを決定づけます。ESCファームウェアには、サポートされているプロトコルと設定インターフェースに関する情報が含まれています。ESCファームウェアにはいくつかの種類があり、選択可能です。
- BLHeli ESC。
- BLHeli_S ESC
- サイモンK ESC
- KISSファームウェア
- BLヘリ_32
このうち、BLheli ファームウェアと Simonk ファームウェアはオープン ソースであり、KISS ファームウェアはクローズド ソースであるため、KISS ESC のみで実行できます。
5. BECの有無
バッテリーエリミネーションサーキット(BEC)は、バッテリーエリミネーションサーキットの略称です。BECは、所定の電圧で安定した電流を維持します。フライトコントローラー、無線受信機(RX)、その他の5Vコンポーネントは、この5V出力から電力を供給されます。しかし、現在ではクワッドコプターシステムには配電盤が採用されているため、BECを備えたESCは実際には不要です。

オプトESCとは、BES(バッテリー電圧監視)機能のないESCを指します。フライトコントローラーと受信機には、5V BEC(バッテリー電圧監視)機能のない別電源が必要です。ESCには、上図に示すように「赤」のサーボワイヤーは付属していません。信号線とアース線のみを使用します。
6. ESCとモーターの接続
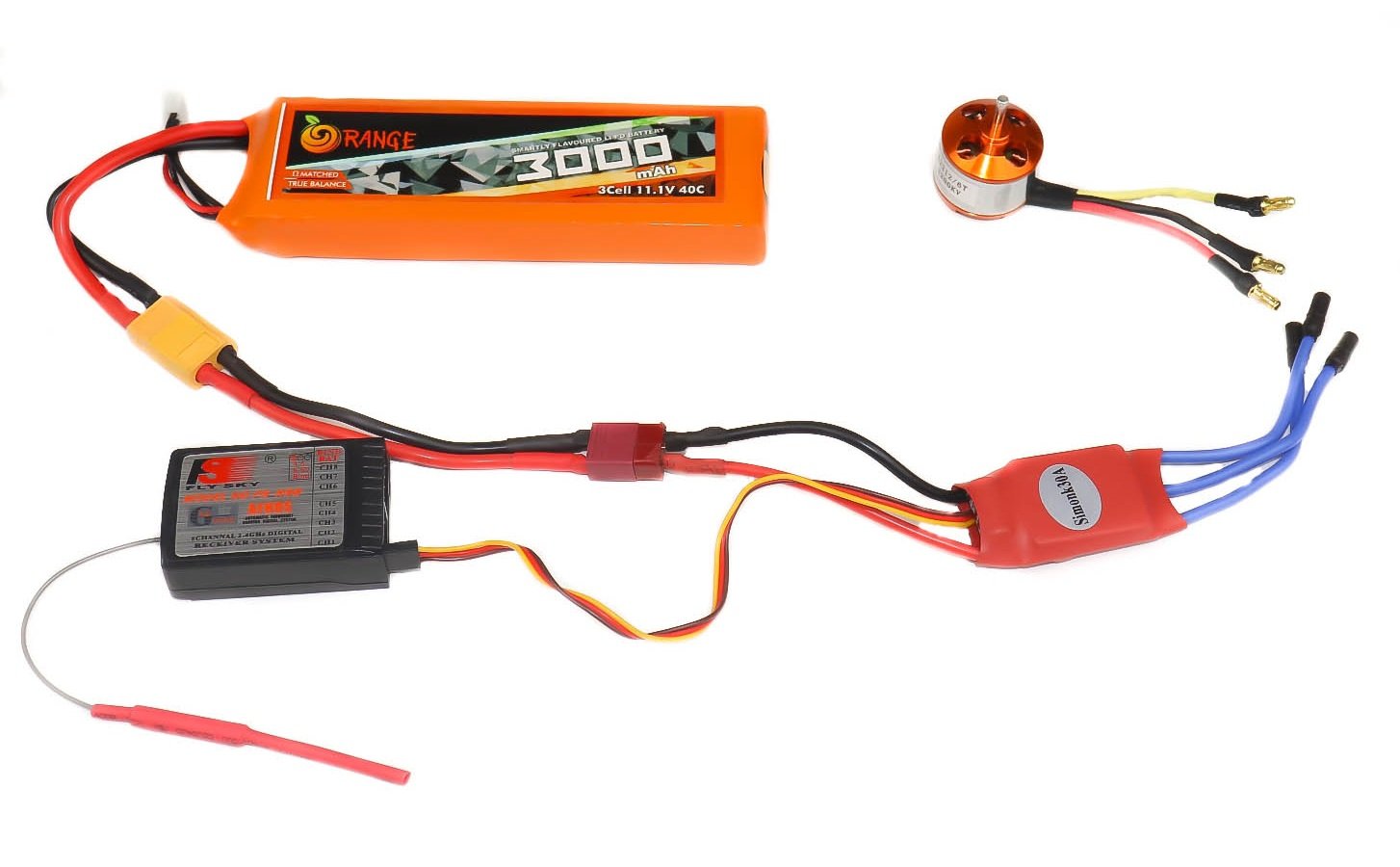
ESCはLiPoバッテリーで動作します。モーターの速度は、フライトコントローラーから受信した信号によって制御されます。ブラシレスESCには3本のワイヤーがあり、モーターの3本のワイヤーに差し込むか、はんだ付けします。以下は、LiPoバッテリー、RC受信機、ブラシレスモーターを備えたスタンドアロンESCです。
7. ESCプロトコル
プロトコルはESCのオペレーティングシステムに似ています。ESCとFC(フライトコントローラー)の通信速度に影響を与え、クワッドコプターの操縦性と性能に大きな影響を与えます。
以下は、クワッドコプターで現在使用されているプロトコルのリストです(古いものから新しいものまで)。
- 標準PWM
- ワンショット125
- ワンショット42
- マルチショット
- Dショット
- プロショット
8. ESCプロセッサ
ESCのプロセッサの大部分は、ATMEL、Silabs、ARM Cortex製です。これらのプロセッサはすべて、独自の機能、特性、ファームウェアサポートを備えています。
- ATMEL 8ビットはSimonKとBLHeliファームウェアの両方と互換性があります
- SILABS 8ビットはBLHeliまたはBLHeli_Sのみと互換性があります
- ARM Cortex 32ビット(例:STM32 F0、F3、L4)はBLHeli_3で実行できます。
最高のクワッドコプター用ESC

マルチローターESCのファームウェアとして最も普及しているのは、Bethel、Simonk、Kissのいずれかです。CleanFlightは、すべてのCleanFlightベースのフライトコントローラーに組み込まれている「BLHeliパススルー」機能をサポートしており、これによりマルチローターESCのプログラミングとアップデートをフライトコントローラーのコンピューターから直接行うことができます。
より複雑なリニアモード型BECから、より効率的なスイッチングモード型BECにアップグレードする場合は、適切なBECを選ぶことが重要です。数学と用語(種類、入力電圧、出力電圧、定格など)を復習する必要があります。必要なものがすべて揃っていることを確認するために、
ESCの応用
電子速度制御システムは、リモート コントロールや車両アプリケーションで使用されます。
- 電気自動車
- 電動自転車
- 電気航空機
- 車
- ヘリコプター
- 飛行機
- ボート
- クワッドコプター
- ESCファームウェア
結論
ESCは、ドローンを私たちが期待する応答性に優れ、使いやすい飛行装置にするために連携して機能する多くのコンポーネントの一つです。ESCは、ドローンのフライトコントローラーとモーターの間の中継器として機能し、操縦者の指示を実際の動きに変換します。
ほとんどの一般向けドローンにはESCが内蔵されているため、普段ドローンを操縦する人は特に気にする必要はありません。DIYドローンをいじくり回すのが好きな人は、ESCの仕組みと優れた機能について基本的な知識を身に付けておくことで、ドローンの性能を微調整するのに役立ちます。迅速なレスポンスとコンパクトなサイズが求められるドローン用途では、適切なESCを選択することが非常に重要です。




コメントを残す