私たちはテクノロジーを基盤とした社会に生きており、日々多くの革新的なアイデアが生まれています。エレクトロニクスプロジェクトにおけるこれらの新たなイノベーションは、産業プラットフォームの最新トレンドに関する知見を共有し、収集しようと常に努力する、成長を続けるネットワークとして生まれています。クワッドコプターの製作は近年人気の趣味となっており、ますます多くの人がその部品について学び、実際に製作に挑戦しています。

センサーと制御システムの高度化に伴い、クワッドコプターはますます普及しています。この記事では、クワッドコプターに最適なモーターの選び方について徹底的に解説します。
導入:
クワッドコプター用のモーターを選ぶ最初のステップは、機体全体の重量を把握することです。機体を構成するすべての部品を考慮することで、おおよその重量を推定できます。クワッドコプターの多くの要素は、フレームの種類によって決まります。例えば、使用できるプロペラのサイズや搭載できるエンジンのサイズなどです。必要なモーターのサイズは、主にドローンやクワッドコプターのサイズによって決まります。
そのため、最適なセットアップを決める最初のステップは、構築したいドローンのサイズ、選択したフレームで動作可能なプロペラのサイズ、そして使用するバッテリーを決定することです。目標は、飛行スタイル、ドローンの機能、そしてドローンのサイズに合った、バランスの取れた、優れた設計のシステムを構築することです。モーターを適切に取り付けることで、飛行時間、機材の使用時間、摩耗の軽減、温度低下などのメリットが得られます。
推力重量比
マルチローターの種類を問わず、ドローンに搭載されているモーターが、ドローンの実重量の約50%以上の推力を発生できることを確認することが重要です。全てのモーターの推力が不足すると、ドローンは操縦に素早く反応せず、離陸できません。風が少し強い場合でも、ドローンのモーターは安定して効率的に飛行する必要があります。推力対重量比の高いドローンは機敏性と加速性に優れていますが、操縦は難しくなります。

クワッドコプターのフレームがあり、部品の総重量が約800グラムだと仮定します。この場合、クワッドコプターのモーターは、クワッドコプター1機あたり約400グラム、つまり合計1.6kgの推力を発生できる必要があります。これは、モーターを選ぶ際に覚えておくべき重要なルールです。ドローンが効果的に機能するには、最も過酷な条件でも動作する必要があるからです。
レーシングドローンの推力重量比は、標準的なマルチローターよりもはるかに高くなります。レーシングドローンにとって理想的な推力重量比は5:1です。
ドローンでゆっくりと安定した空中写真を撮影したい場合は、推力対重量比を 3:1 または 4:1 に保つ必要があります。
モーターの効率
推力重量比がわかったので、次はモーターの効率について見ていきましょう。推力重量比とは、発生する推力と印加電力の比です。つまり、効率の高いモーターは、推力を発生させるために消費する電力が少なくなります。
モーターの効率は、飛行時間を決定します。つまり、モーターの推力と消費電力が大きければ大きいほど、飛行はスムーズになり、飛行時間も長くなります。モーター効率はドローンの飛行時間を延ばす上で非常に重要なので、重要な検討事項です。
運動動作
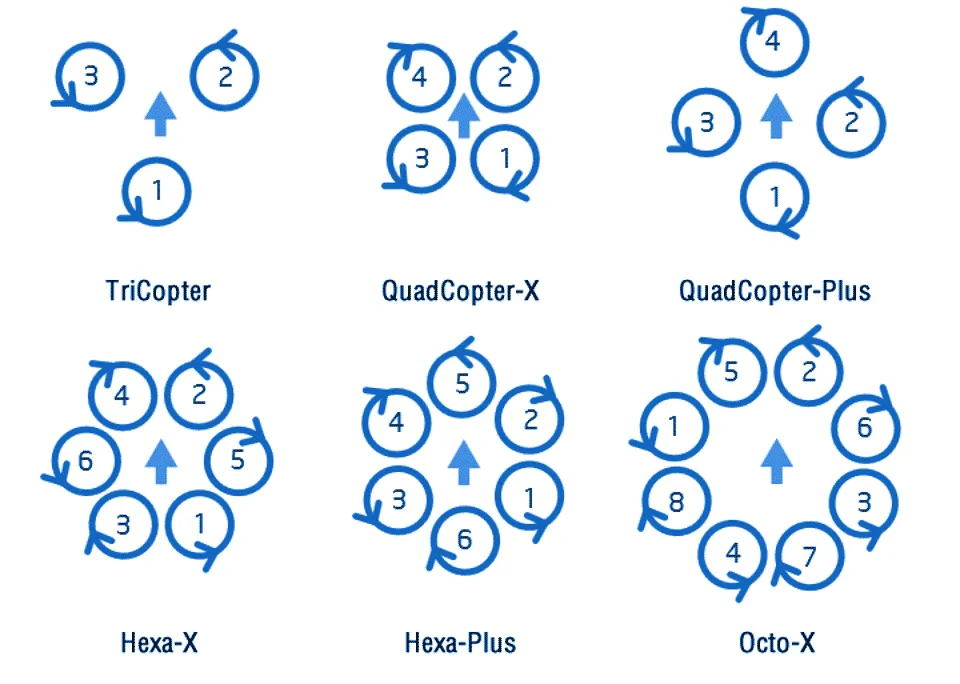
クワッドコプターなどのドローンは、2つのモーターを時計回りに回転させ、他の2つのモーターを反時計回りに回転させることによって移動します。これにより、モーターの安定性が向上し、デバイスの効率が向上します。
ポールカウント
次にモーターの極数について考えます。まず、極数が多いクワッドコプター用モーターです。飛行中はより高い電圧が必要になりますが、モータートルクは高くなります。しかし、極数が多いとモーターの回転速度は低下します。このようなモーターデバイスでは、より大きなブレードの使用が推奨されます。
一方、回転数を上げるには、極数の少ないモーターを使用します。ただし、これらのデバイスではブレードが小さくなるため、トルクと揚力が低下します。クワッドコプターでは、ギアボックスの必要性を回避するために、極数の多いモーターが使用されることがよくあります。
NとPはそれぞれ極と磁石を表します。ブラシレスモーターを調べると、12N14Pのような仕様が出てきます。Nの前の数字はステーター内の電磁石の数を示し、Pの前の数字はベル内の永久磁石の数を示します。

KV定格
もう一つの重要なモーターパラメータはKV定格です。KV定格は、モーターの1ボルトあたりの回転数を表します。例えば、1000KVのモーターを選択し、12Vのリポバッテリーを使用する場合、合計回転数は1000×12=12000となります。

空気抵抗のため、プロペラをモーターに取り付けると回転数が低下します。KV値が高いほどプロペラの回転速度が速くなり、より多くの電流を引き出すことができます。そのため、KV値の低いモーターでは大型のプロペラが一般的に使用され、KV値の高いモーターでは小型で軽量のプロペラが適しています。
大型のプロペラと高KVモーターを組み合わせると、プロペラを高速回転させるにはより大きなトルクが必要になります。必要なトルクを供給すると同時に、より多くの電流を消費し、過剰な熱が発生します。過熱はモーターに損傷を与える可能性があります。
モーターサイズ
ブラシレスモーターは通常、4桁の数字で分類されます。例えば、モーターの名称の最初の2桁の数字はステーターの直径(mm)を表します。ステーターの高さは最後の2桁の数字(mm)で表されます。モーターの幅と高さが大きいほど、より大きなトルクを発生できます。
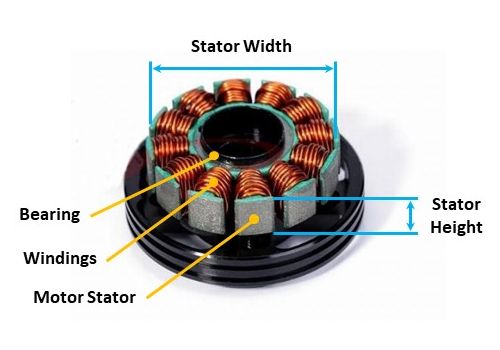
- ステーターが高いほど、回転数が高くなり、パワーが増す
- ステーターが広いほど、低い回転数でもトルクが大きくなる
ステーターの高さが増すほど、より大きな磁場を遮断でき、表面積が大きくなるため放熱効果も高まります。ステーター幅が広いモーターでは、ステーターに含まれる鉄と銅の量が増えるため、トルクと効率が向上します。
エンジンサイズとKVはフレームサイズによって制限され、プロペラサイズはプロペラの寸法によって制限されます。下の表は、モーターサイズの推奨サイズを示しています。「フレームサイズ」とは、エンジンとフレーム間の距離を指します。

電圧と電流の引き込み
バッテリー電圧はモーターに大きな影響を与えます。電圧が高いほど、ドローンのモーターはより速く回転し、より多くの電流を消費します。モーターがどれだけの推力を発生させ、どれだけの電流を消費するかを判断する必要があります。モーターとプロペラの組み合わせによる消費電流に基づいて、ESCを選択できます。
結論
ドローンに最適なモーターを選ぶのは、最も難しい作業の一つです。考慮すべき要素は様々です。ドローンにとって最も重要な要素の一つはモーターです。最高のパフォーマンスを引き出せるモーターを選ぶようにしましょう。このブログ記事が、クワッドコプターのモーターパラメータに関する理解を深める一助になれば幸いです。




コメントを残す